Teslatouch
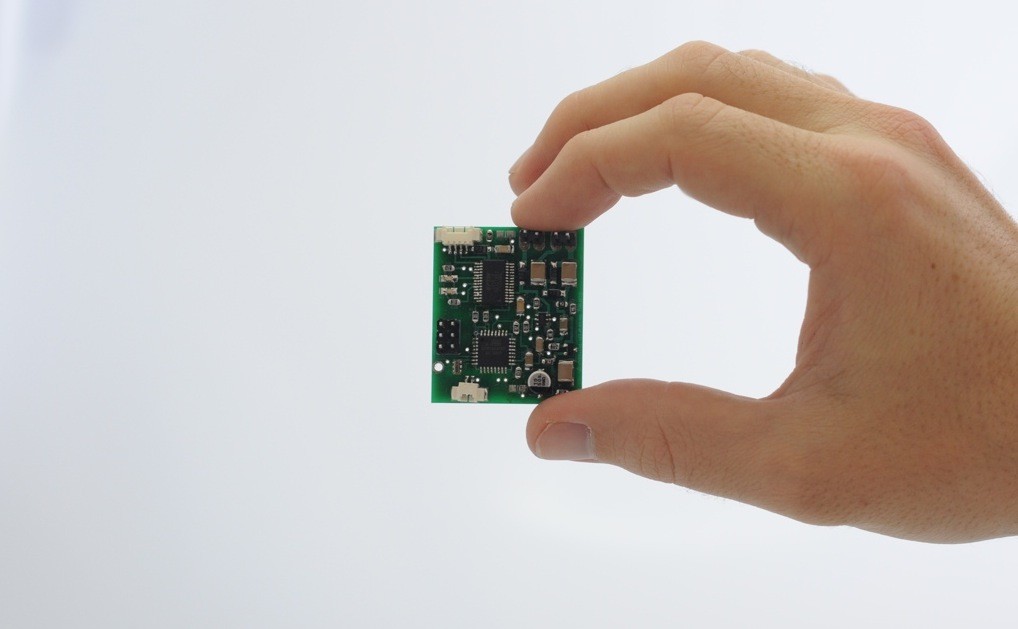
TeslaTouch is a new technology for enhancing touch interfaces with tactile sensations. It is based on the electrovibration principle, which can programmatically vary the friction between sliding fingers and a touch panel. The TeslaTouch technology requires no moving parts, is therefore inexpensive, lightweight and requires little power. Our technology provides a wide range of tactile sensations to fingers sliding across touch-screens of any shape or size, from small mobile displays to curved or wall-sized screens.
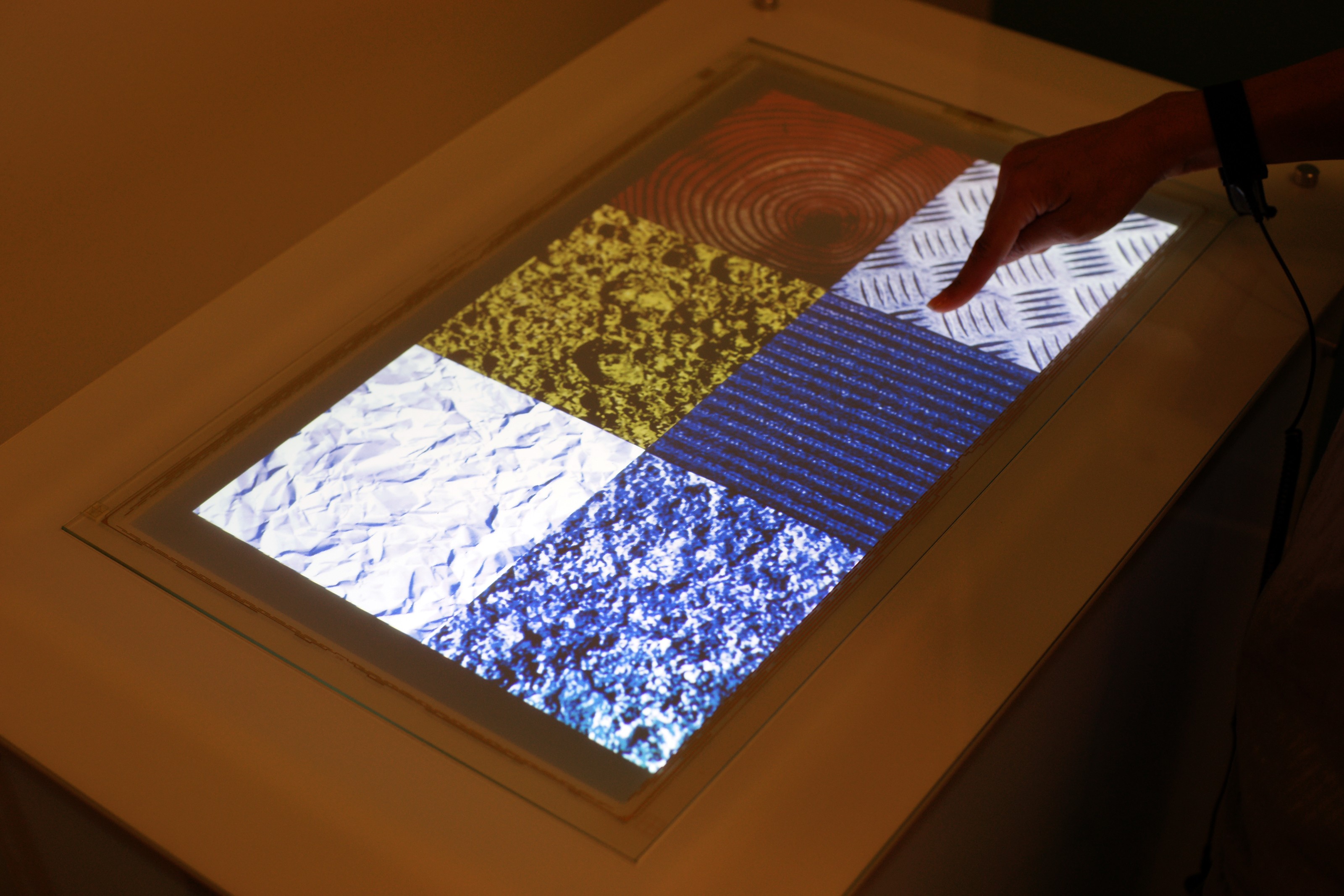
TeslaTouch can be easily combined with a wide range of touch sensing technologies, including capacitive, optical and resistive touch screens. When combined with an interactive display and touch input, our tactile technology enables the design of interfaces that allow the user to feel virtual elements through touch. It can be used to enhance a wide range of applications with rich tactile feedback, such as feeling the properties of interface elements in graphical user interfaces, maps and characters in video games, textures and colors in graphical painting applications, and many more.
How does TeslaTouch work?

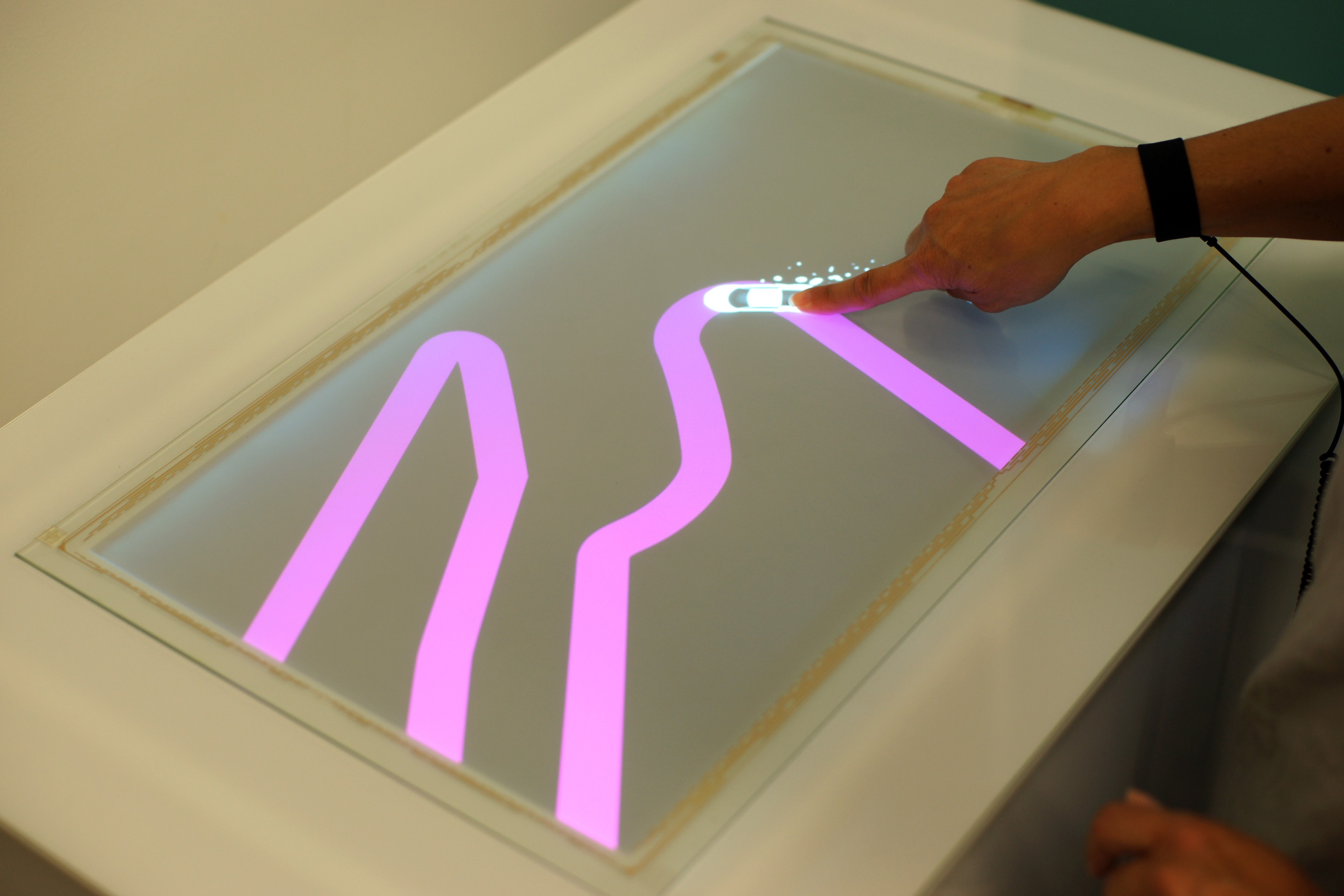
TeslaTouch is based on the principle of Electrovibration discovered in 1953. An electrode is excited with an electrical signal of sufficient amplitude, generating a periodic attractive force between a sliding finger and the panel. This creates a dynamic friction between the finger and the surface of the panel.
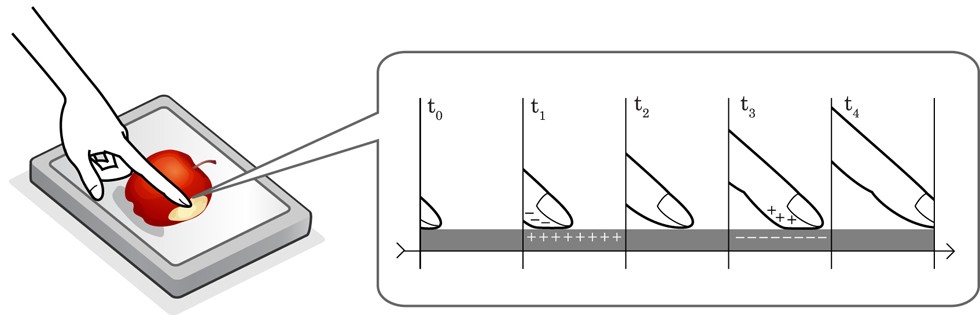
Changes in friction are periodic and result in dynamic tactile textures on a mechanically static glass surface. Depending on signal amplitude and frequency, these textures are perceived as either vibrations or friction.
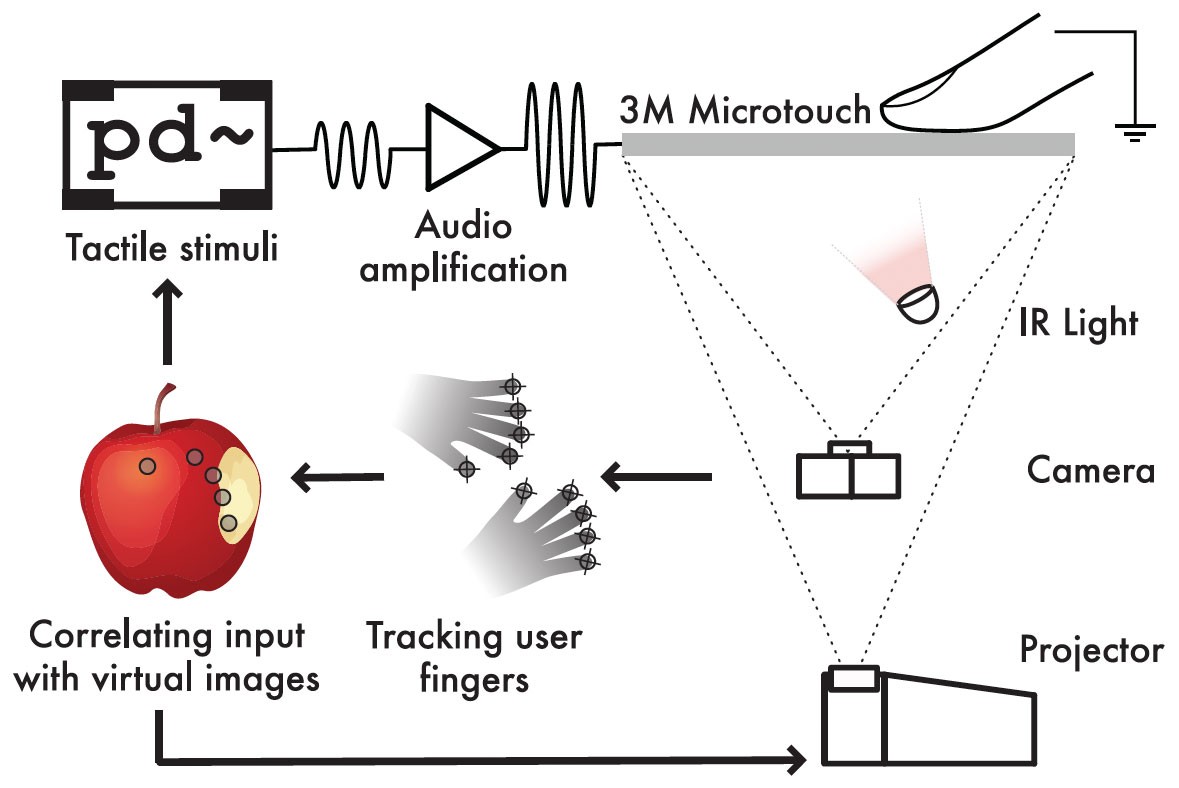
TeslaTouch can be combined with multiple sensing techniques, such as capacitive sensing or FTIR strategies, commonly used in the design of large touch surfaces.
What are the applications of TeslaTouch?







Publications and Awards
O. Bau, I. Poupyrev, A. Israr and C. Harrison. 2010.
TeslaTouch: Electrovibration for Touch Surfaces. UIST ’10. [ACM]
Electrovibrations for Hand Held Devices using TeslaTouch.
A. Israr, O. Bau, I. Poupyrev. 2011. Demo at World Haptics Conference 2011.
Tactile Display for the Visually Impaired Using TeslaTouch.
C. Xu, A. Israr, I. Poupyrev, O. Bau and C. Harrison. 2011. Demo at CHI ’11. [ACM]
TeslaTouch: new tactile feedback technology for touch-surfaces.
O. Bau, I. Poupyrev and R. Aiello. 2011. Demo at SID Display Week Exhibition, Los Angeles.
Best Demo Award, World Haptics, 2011.
Team and Credits
The TeslaTouch technology was developed with Ivan Poupyrev, Ali Israr in collaboration with Chris Harrison from CMU. Mark Baskinger and Jason May, CMU School of Design designed and produced the TeslaTouch prototype enclosure.
Selected Press
CNN Tech. When glass touch screens feel like sandpaper. October 8, 2010.
BBC Click. Touchscreen mobile technology developed to aid blind. December 3, 2010.
MIT Technology Review. A Touch Screen with Texture. October 13, 2010.
The Creators Project. Just Imagine Feeling Texture On Your Touchscreen. December 15, 2011.
Amusement Magazine. Interforces. June 13, 2012.
CScout Trend Consulting. Five Favorites from CES 2011. January 19, 2011.
PBS MediaShift. 10 Mobile Trends in 2011. January 10, 2011.
Orlando Sentinel. The Daily Disney.January 4, 2011.
MSNBC. Feel the future: Touch screens that touch back. December 30, 2010.
TechNews Daily. Touch Screens That Touch Back: Feeling in the Future. December 29, 2010.
L’Usine Nouvelle. Des Textures Electroniques. December 2, 2010. N 3216-3217.
Pop City. Pittsburgh’s Disney Research puts the touch into touchscreens. October 27, 2010.